

0.1-1.0mm Mixed 3D Printer Nozzle Cleaning Drill Bit Kit for MK7 MK8RepRap - 10 Pieces
Original price was: ₹325.00.₹300.00Current price is: ₹300.00.

Electromagnetic Buzzer - 5V - PCB Mount
Original price was: ₹28.00.₹18.00Current price is: ₹18.00.
-15%






Related Products

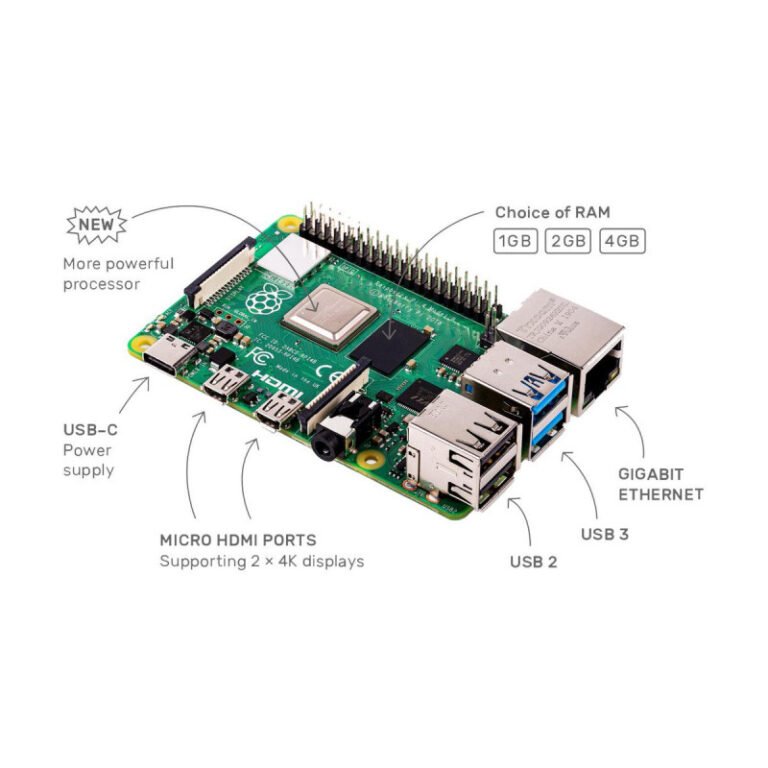
Raspberry Pi 4 Model B with 4GB Ram (Latest & Original)
Finally what we all are waiting for, Raspberry Pi Foundation has launched their Latest and original Raspberry Pi 4 Model B in 3 versions:-
1. Raspberry Pi 4 Model B with 1 GB Ram
2. Raspberry Pi 4 Model B with 2 GB Ram
3. Raspberry Pi 4 Model B with 4 GB Ram
Buy Raspberry Pi 4 Model B with 4 GB Ram Starter Kit with all necessary accessories at Low Price.
You can also buy Raspberry Pi 4 Model B with 1 GB Ram Starter Kit and
Raspberry Pi 4 Model B with 2 GB Ram Starter Kit at best price in India.
0-24 24V 2A Step Down Transformer
0-24 2Amp Step Down Transformer is a general purpose chassis mounting mains transformer. Transformer has 230V primary winding and non-center tapped secondary winding. The transformer has flying colored insulated connecting leads ( Approx 100 mm long ). The Transformer act as step down transformer reducing AC - 230V to AC - 24V.




 Boards & Modules
Boards & Modules ARM Microcontroller
ARM Microcontroller AVR Microcontroller Board
AVR Microcontroller Board Arduino boards
Arduino boards Advance Development Boards
Advance Development Boards 8051 Development Board
8051 Development Board
 Audio Amplifier Module
Audio Amplifier Module Current & Volatage Sensor
Current & Volatage Sensor Breakout Board
Breakout Board Flame Sensors
Flame Sensors Force Sensor
Force Sensor Gas Sensors
Gas Sensors Hall Effect Sensor
Hall Effect Sensor Humidity & Temperature Sensor
Humidity & Temperature Sensor LED Module
LED Module PIR Sensor
PIR Sensor Pressure Sensors
Pressure Sensors Proximity Sensor
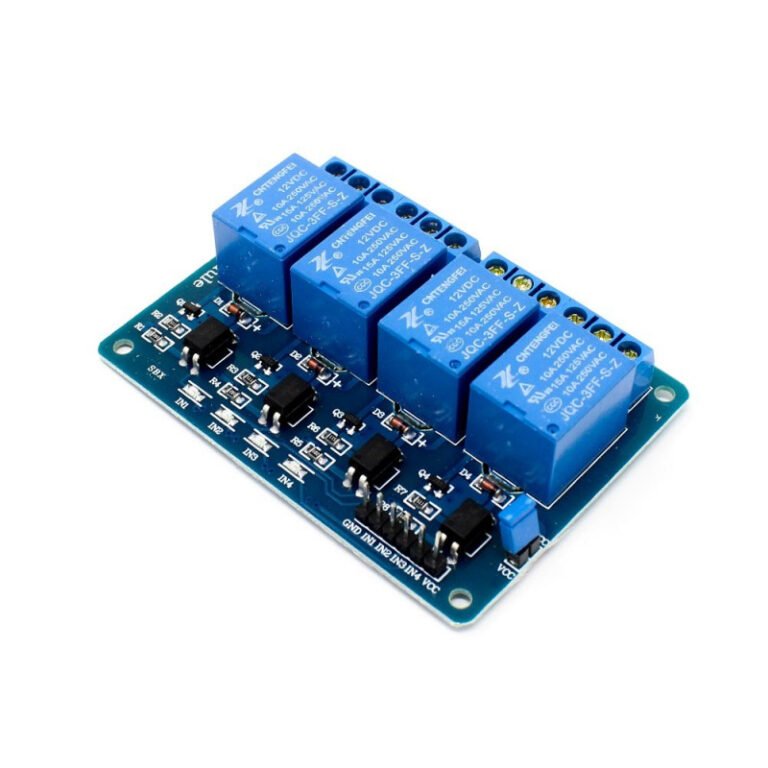
Proximity Sensor Relay Module
Relay Module Real Time Clock (RTC) Module
Real Time Clock (RTC) Module Touch Sensor
Touch Sensor Ultrasonic Sensor
Ultrasonic Sensor Water Level & Water Flow Sensor
Water Level & Water Flow Sensor Weighing Scale Sensor
Weighing Scale Sensor
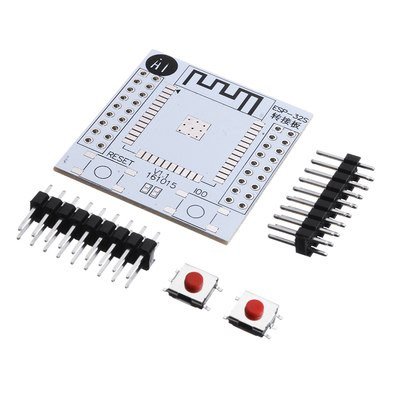
 Ai Thinker ESp Wifi Module
Ai Thinker ESp Wifi Module Pic Devlopment Board & programmer
Pic Devlopment Board & programmer Led lights & Strips
Led lights & Strips PCBs & Breadboard
PCBs & Breadboard Potentiometer
Potentiometer Power Transistors
Power Transistors Resistor & Smd & inductor
Resistor & Smd & inductor Switches
Switches Aluminium Heat Sink
Aluminium Heat Sink Buzzer & Speaker
Buzzer & Speaker capacitor
capacitor Crystal Oscillators
Crystal Oscillators Doides
Doides Electric Fuses
Electric Fuses ICs & Dips
ICs & Dips Power supply module
Power supply module Transformer
Transformer Relay Module
Relay Module Kits
Kits Magnet
Magnet RF Connectors
RF Connectors PCT and DC Connectors
PCT and DC Connectors Wires & Heat Shrink
Wires & Heat Shrink FFC, FPC, Berg connectors
FFC, FPC, Berg connectors
 Nextion
Nextion Segment
Segment Seedstudio
Seedstudio Waveshare
Waveshare E Bike Batteries
E Bike Batteries E bike Battery Case
E bike Battery Case E bike Connectors
E bike Connectors E bike Display
E bike Display E bike Kit
E bike Kit E bike Motors & Controllers
E bike Motors & Controllers Electronics Accessories
Electronics Accessories Mechanical Accessories
Mechanical Accessories
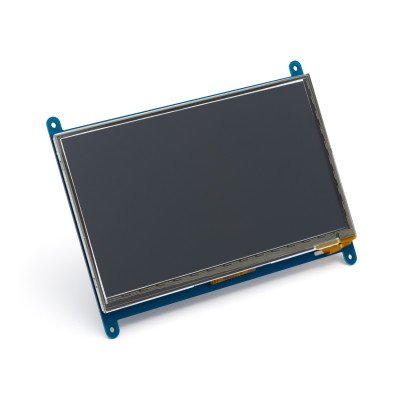
 Display
Display Cameras
Cameras
Reviews
There are no reviews yet.